Đấu nối
Ví dụ mẫu kết nối plc omron cp1e với servo yaskawa sgima ii mã driver là sgdm và mã động cơ là sgmah.
Servo sgdm cổng CN1
- Chân Pulse+ là chân số 7.
- Chân Pulse- là chân số 8.
- Chân Sign+ là chân số 11
- Chân SIgn- là chân số 12.
- Chân servo là chân số 40.
- Chân cấp nguồn +24V là chân 47.
Đấu nối vào plc
- Chân 47 của servo đấu vào chân + của plc ở hàng ngõ ra.
- Chân 40 đấu vào chân – ở hàng ngõ ra nếu bạn muốn mở nguồn lên là servo on luôn, hoặc nếu muốn servo on trên chương trình thì đấu vào ngõ ra bất kỳ, có thể đấu vào 100.07.
- Chân số 7,11 của servo nối qua trở 2.2kOhm rồi đấu vào chân + ở ngõ ra PLC.
- Chân số 8 và 12 lần lượt đấu vào ngõ ra 100.00 và 100.04
- Chân COM của plc nối vào chân – ở hàng đấu ngõ ra.
Lưu ý: bởi vì chân nhận xung của servo chỉ nhận xung 5V nên khi sử dụng nguồn trên PLC là 24V thì các bạn nhớ nối thêm điện trở hạn dòng 2.2kW nếu không sẽ làm hư hỏng chân nhận xung này.
Cài đặt thông số trên driver sgdm
Trong ví dụ này mình sẽ hướng dẫn các bạn cài đặt driver servo yaskawa sgdm ở chế độ chạy vị trí nhận 1000 xung thì quay đúng 1 vòng:
- Đầu tiên các bạn cài Pn000=0010- chọn chế độ điều khiển động cơ ở chế độ chạy vị trí.
- Pn200=0000- chọn chế độ chân 7-8 là chân nhận xung, còn chân 11-12 là chân chọn chiều tới lùi.
- Mã motor là sgmah-04aâ41 có độ phân giải là 13 bit nên mình sẽ cài hộp số điện từ pn202=8192 và pn203=1000 để khi phát 1000 xung thì servo sẽ di chuyển đúng 1 vòng.
Sau khi cài đặt xong các bạn nối chân 40 vào chân -(0V) ở hàng đấu ngõ ra để xem servo có RUN được chưa.
Chương trình mẫu
Xong khi đã cài đặt xong cho driver servo yaskawa các bạn tiến hành viết chương trình mẫu như sau:
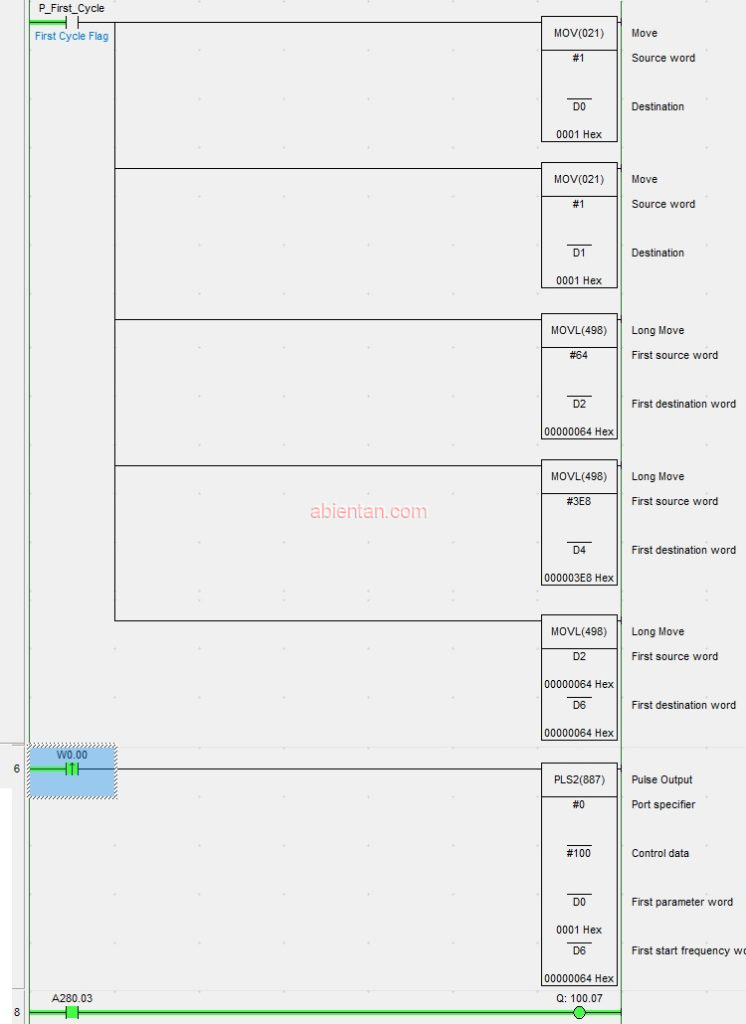
Mô tả chi tiết chương trình:
- Các thông số của lệnh này các bạn vui lòng tham khảo bài trước về lệnh phát xung tốc độ cao trên plc Omron.
- Bạn chỉ cần quan tâm tới giá trị ô nhớ D2 là tần số xung sẽ phát, D4 là số xung sẽ phát. ở đây tần số #64 ở hệ hexa ứng với 100Hz, số xung là #3E8 ứng với 1000 xung ứng với động cơ quay được 1 vòng.
- Khi bit w0.00 được kích hoạt lên 1 thì ngõ ra 100.00 sẽ phát ra 1000 xung với tần số 100Hz đồng thời chân 100.02 sẽ On.
- Khi phát đủ 1000 xung thì bit A280.03 sẽ On lên đồng thời out ra 100.07
=> Đây là lệnh điều khiển vị trí cơ bản chưa bao gồm phát xung có tăng giảm tốc, để phát xung có thời gian tăng giảm tốc thì các bạn đọc thêm về lệnh pls2 nhé.